دانلود پروژه رایگان فیلتر کالمن برای ردیابی مسیر با MATLAB
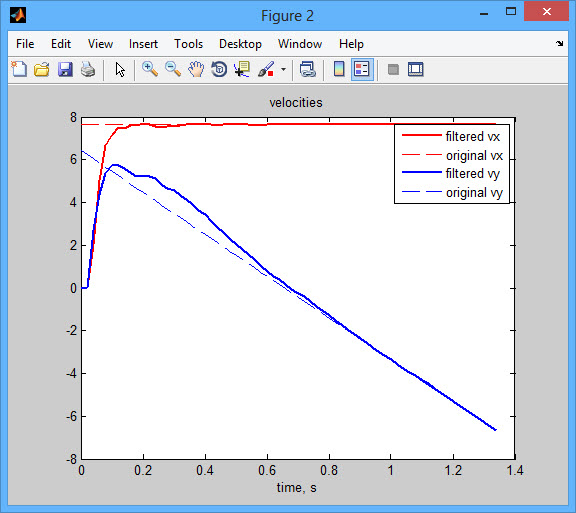
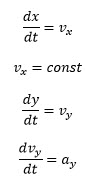
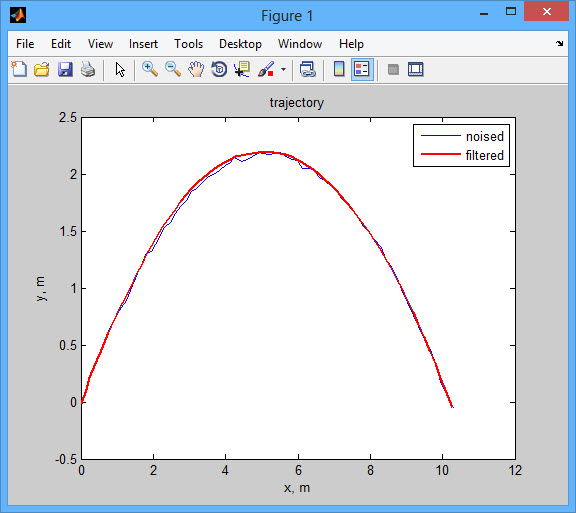
فیلتری که مسیری برای آغاز حرکت از زمین با سرعت زاویه 40 درجه آغاز می کند را اعمال کرده ایم که بخش قرمز رنگ در عکس یک می باشد. سپس دماغه را برای شبیه سازی اندازه گیری دماغه و یا تشخیص یک شی از دماغه را اعمال کره ایم. سپس نویز گاوسیان را به صورت تصادفی که اعداد تصادفی برای توزیع گاوسیان با انحراف استاندارد سیگما می دهد را تولید کرده ایم. سپس فیلتر کالمن را اعمال نموده ایم. فیلتر کالمن، تخمین حالت های سیستم در زمان با استفاده از یک سری اطلاعات راجع به مدل را می دهد. در این پروژه، اطلاعات شامل حرکت آزاد در جهت افقی و حرکت شتاب در جهت عمودی هستند. دقت شود که شتاب ثابت است. سپس بدنه کلی توسط مکان (x,y) و سرعت (vx,vy) و شتاب عمودی ay توصیف می شود. سپس حالت سیستم ما بردار زیر خواهد بود:

و معادله حرکت:
اگر گام زمانی دلتا t به اندازه کافی کوچک باشد، می توانیم از تقریب اویلر استفاده کنیم:
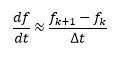
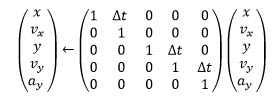
سپس معادله حرکت به طور زیر خواهد بود:

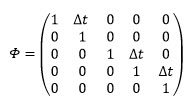
که در آن منظور از —> این است که نیاز به بروز رسانی مقدار در حلقه داریم. دقت شود که در این بخش vx و ay تغییر نمی کنند. فیلتر کالمن به این فرم ماتریسی نیاز خواهد داشت:
که در واقع ماتریس بالا حالت کلی زیر می باشد:
ما فقط در این پروژه مختصات x و y با دماغه را رعایت کرده ایم:
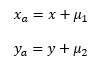
فرم کلی ماتریس با حالت ذکر شده:
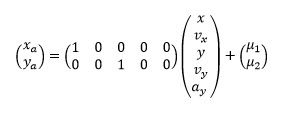
که می توان به صورت زیر نیز آن را بیان داشت:
![]()
در کدها به صورت کامل به زبان پارسی برای شما کاربران عزیز کامنت گذاری کرده ایم.
لینک دانلود پروژه از دراپ باکس
لینک دانلود پروژه از هکس آپلود
لینک دانلود ویدئوی اجرای پروژه از دراپ باکس
لینک دانلود ویدئوی اجرای پروژه از هکس آپلود
عکس 1
عکس 2