دانلود پروژه رایگان تشخیص موانع با استفاده از دید استریو برای خودروهای بدون راننده با MATLAB
لینک دانلود مستقیم با مقاله و پوستر
وب سایت های زیادی یا به فروش این پروژه می پردازند، یا به محض قرار دادن رایگان این پروژه توسط گروه نامیرا، به کپی برداری غیراخلاقی می پردازند. لطفا به تاریخ درج پروژه در وب سایت و وبلاگ های گروه نامیرا دقت بفرمایید.
آخرین اخبار فعالیت های گروه نامیرا در کانال تلگرام: https://telegram.me/nn4enamira
اطلاعاتی راجع به پروژه
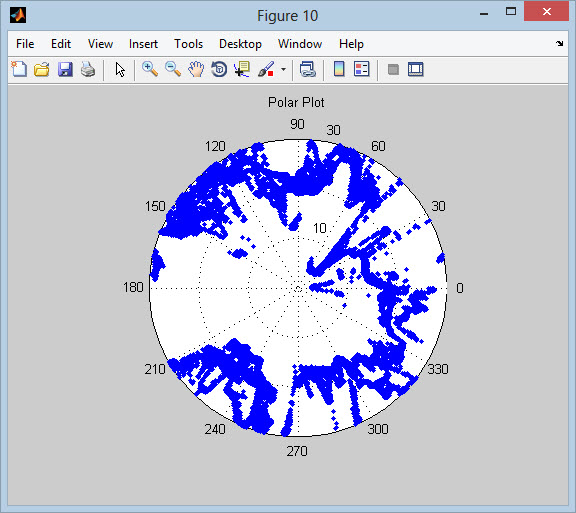
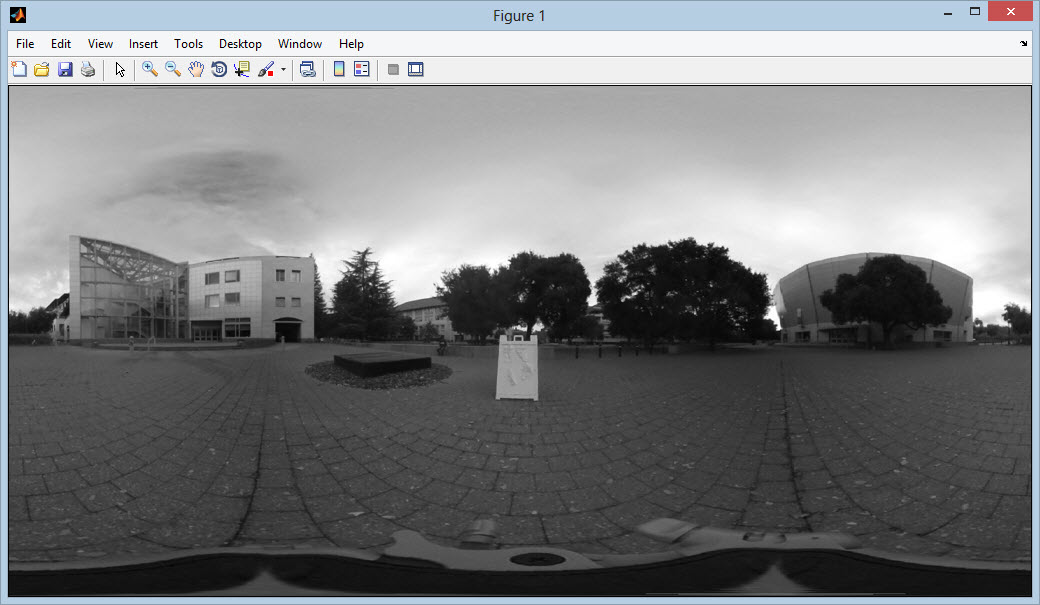
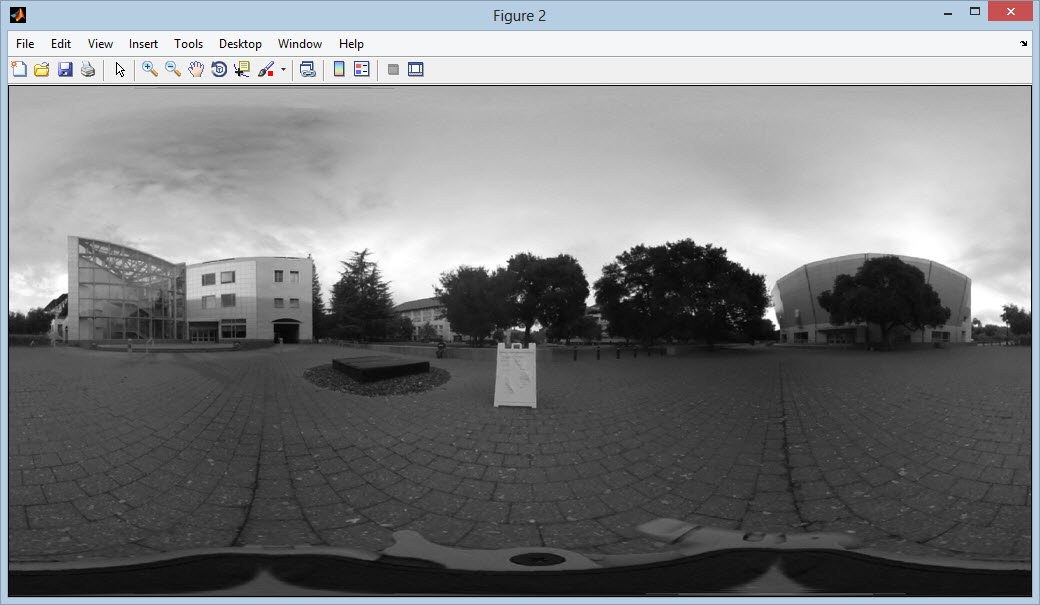
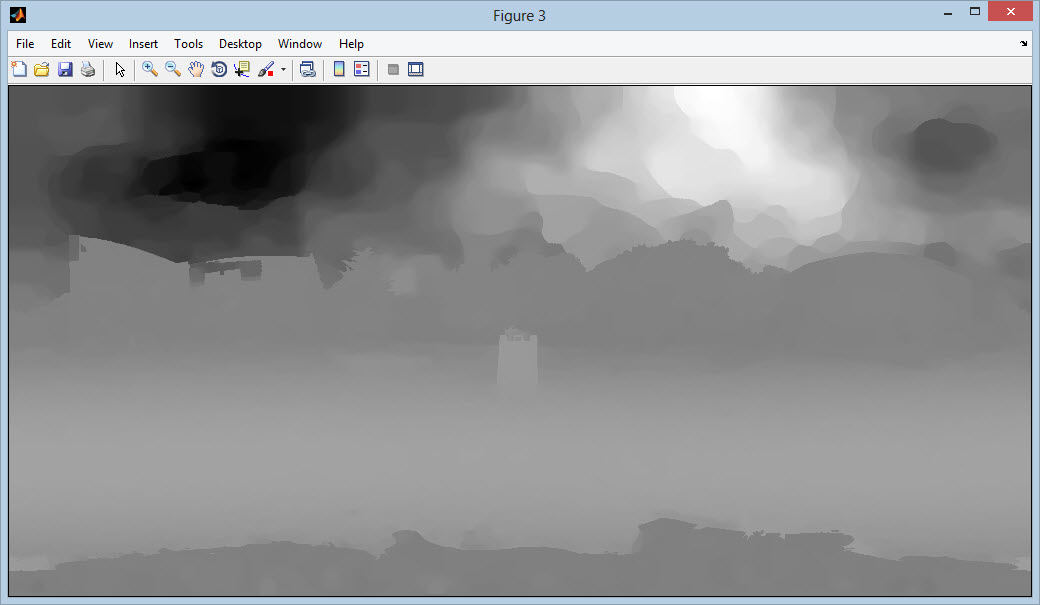
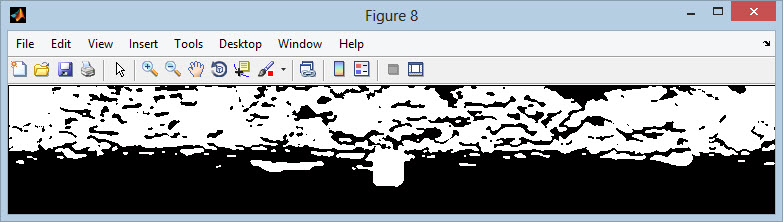
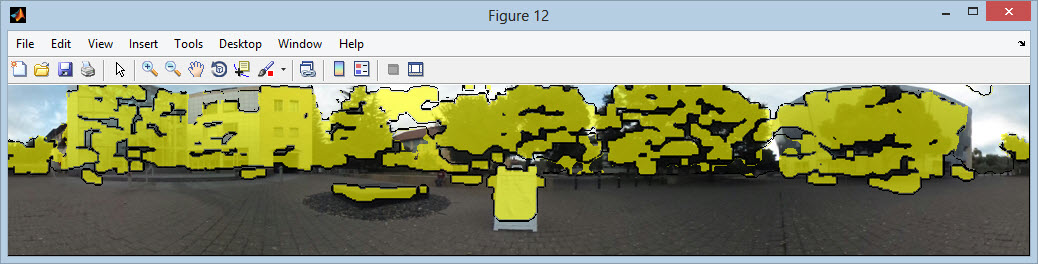
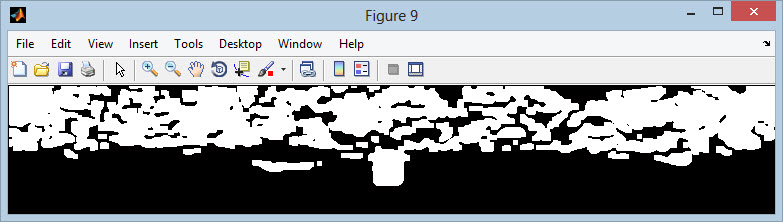
یکی از ضرورت ها و چالش های سیستم های خودگردان از جمله خودروهای بدون سرنشین، درک محیط اطراف با دقت و سرعت بالا به شمار می رود. اکثر سیستم های حسگری مانند رادار و ماهواره های لیدار (LIDAR) که امروزه برای درک محیط برای خودروهای بدون سرنشین مورد استفاده واقع می گردند، یک دید 360 درجه ای جهت مطلع ساختن بیشتر خودرو از محیط اطراف در اختیار می گذارند که دارای دید وسیع تری نسبت به انسان می باشد. این تحقیق به ارائه یک روش جهت به کارگیری دو دوربین 360 درجه جهت درک موانع اطراف برای خودروی خودگردان و بدون سرنشین مبتنی بر دید استریو، می پردازد. جایگذاری دوربین با استفاده از دید عمودی به جای دید افقی، این شرایط را فراهم می آورد که محاسبه عمق اطلاعات در نمایش همه جهات به جز زنیت (Zenith) و نادیر (Nadir) که دارای اطلاعات کمتری درباره موانع هستند، فراهم گردد. طبقه بندی نقاط در فضای سه بُعدی مبتنی بر ارتفاع، پهنا و شیب به سمت نقاط همسایه، ایده کلیدی برای تشخیص موانع است.
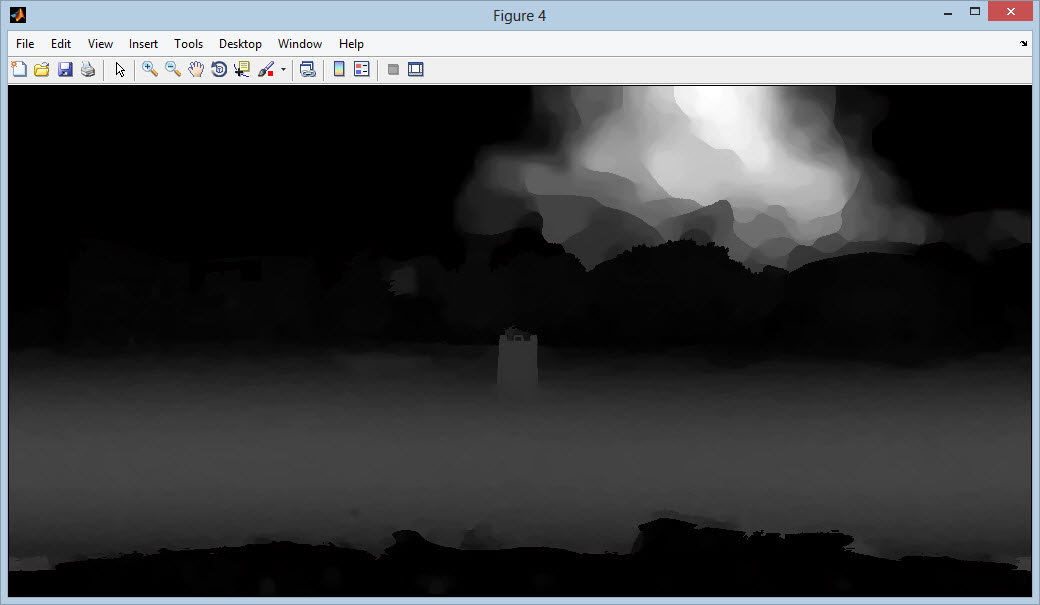
عکس 1
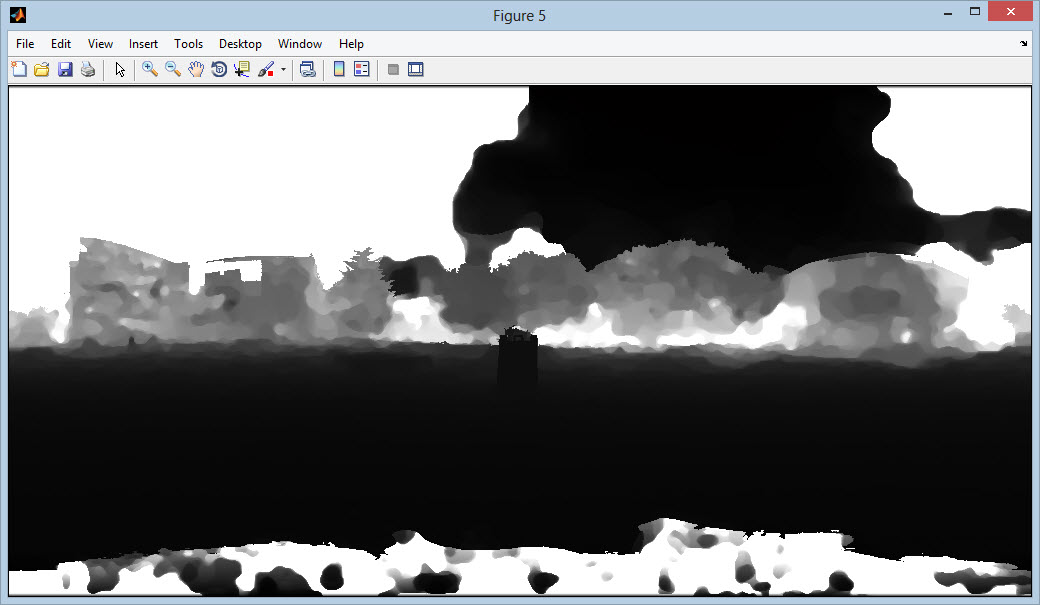
عکس 2
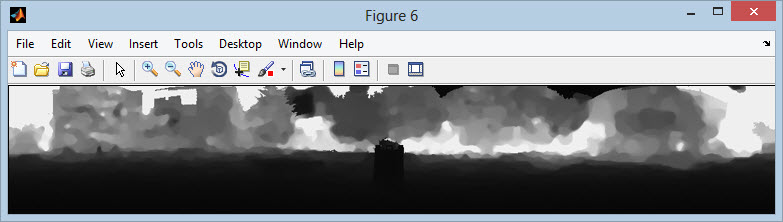
عکس 3
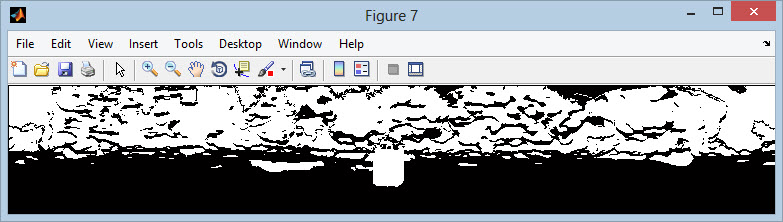
عکس 4
عکس 5
عکس 6
عکس 7
عکس 8
عکس 9
عکس 10
عکس 11